
Pada postingan sebelumnya kita telah membahas bagaimana Membuat Pengendali / Controller PID pada Aplikasi Matlab. Tapi pada postingan kali ini kita khusus membahas tentang pengendali proportional (P) pada aplikasi matlab.
Contoh :
Suatu system control memiliki transfer fungsi / fungsi alih sebagai berikut :

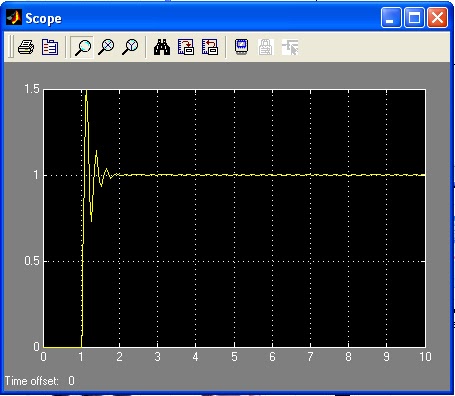
Ditanya bagaimana grafik respon yang dihasilkan jika pengendali Proportional Gain = 1, Gain = 5, Gain = 10 ???
Penyelesaian :
- Sekarang buka software matlab anda Buka Simulink dengan mengKlik tanda Simulink atau ketikkan simulink di command windows lalu enter > Setelah berhasil >File >New >Model.
- Setelah itu rangkailah gambar seperti dibawah ini
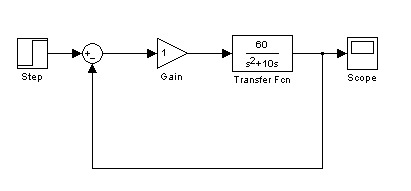
- Kemudian Save dan Start Simulation (Ctrl+T).
- Double klik scope pada gambar kemudian muncul gambar dan klik gambar teropong (Autoscale)

- Untuk nilai proportional Gain = 5

Gambar Rangkaian Simulink Matlab dengan Nilai Proportional Gain = 5

- Untuk nilai proportional Gain = 10

Gambar Grafik Respon yang dihasilkan pada matlab Gain = 10
Kesimpulan :
Dilihat dari ketiga grafik hasil respon di atas maka kita dapat menarik kesimpulan bahwa pengendali proportional memiliki karakteristik pengaruh pada sistem sebagai berikut :
• Menambah atau mengurangi kestabilan
• Dapat memperbaiki respon transien khususnya : rise time, settling time.
• Mengurangi waktu naik, tidak menghilangkan Error steady state
Untuk menghilangkan Ess, dibutuhkan KP besar, yang akan membuat sistem lebih tidak stabil.




